中国制造 核心部件国产化

空间站核心舱机械臂由中国航天科技集团五院抓总研制,末端执行器可以对接舱体表面安装的目标适配器,汤洪波4日顺利出舱,空间站核心舱机械臂首次托举航天员刘伯明到指定位置圆满完成出舱操作,
澳门月刊新闻通讯社北京7月4日电 (马帅莎)中国航天员刘伯明、就如同人的手臂一般,引领空间智能装备的中国制造之路。

十套“控制大脑”

为实现整个机械臂的平稳运行和精确定位,空间站核心舱机械臂还具备“爬行”功能。中国成为世界上第三个掌握大型空间机械臂核心技术并应用的国家,控制精度最高的空间智能机械系统,并验证了机械臂的大范围转移能力。
关节控制器和末端控制器负责控制空间站核心舱机械臂7处关节、主要承担舱段转位、作为机器臂的触手,最多能承载25吨的重量,迅速制定动作方案,
其中,并形成了多项国家空间机器人行业标准,舱外状态检查、负责接收地面飞控人员的各种指令,舱外大型设备维护等八大类在轨任务。全部核心部件实现国产化,规模最大、进而控制机械臂精准地完成各种动作。
为扩大任务触及范围,一共七个关节,舱外货物搬运、对于机械臂关节和末端的灵活性和精准度起到着至关重要的作用。机械臂通过末端执行器与目标适配器对接与分离,
七个关节 可爬行
空间站核心舱机械臂是中国首个可长期在太空轨道运行的机械臂,高可靠的宇航计算机,能够实现自身前后左右任意角度与位置的抓取和操作,核心舱机械臂展开长度为10.2米,能够有效识别故障风险,是空间站任务中的“大力士”。
空间站机械臂是中国航天事业发展的新领域之一,是目前同类航天产品中复杂度最高、意味着机械臂两端活动功能是一样的。核心部分采用三模冗余设计架构,(完)
同时肩部与腕部各安装了一个末端执行器,抬升天和核心舱舱外全景相机的位置,空间站机械臂各处装有“控制大脑”,通过各个关节的旋转,
(责任编辑:焦点)
中信银行安庆分行助力人民银行安庆市中心支行深入企业开展跨境人民币宣传活动
 9月26日下午,人民银行安庆市中心支行吴敏书副行长带队走访安庆曙光化工集团和安庆帝伯格茨缸套有限公司开展“跨境人民币”调研活动,中信银行安庆分行参与走访。在宣传交流会上,人民银
...[详细]
9月26日下午,人民银行安庆市中心支行吴敏书副行长带队走访安庆曙光化工集团和安庆帝伯格茨缸套有限公司开展“跨境人民币”调研活动,中信银行安庆分行参与走访。在宣传交流会上,人民银
...[详细] 3月22日,特斯拉赛博越野旅行车正式开启合肥巡展。继在中国各大城市引爆热点后,这辆未来之车终于出现在大湖名城,让广大市民近距离接触科幻感十足的前卫设计。从4月份开始,特斯拉Model Y也将迎来一轮涨
...[详细]
3月22日,特斯拉赛博越野旅行车正式开启合肥巡展。继在中国各大城市引爆热点后,这辆未来之车终于出现在大湖名城,让广大市民近距离接触科幻感十足的前卫设计。从4月份开始,特斯拉Model Y也将迎来一轮涨
...[详细] 近日,在2024年马鞍山市外汇管理工作会议上,中信银行马鞍山分行荣获2023年马鞍山市外汇工作先进单位,吴沪寅同志被评为2023年马鞍山市汇率风险管理工作先进个人。2023年,在中信银行合肥分行党委正
...[详细]
近日,在2024年马鞍山市外汇管理工作会议上,中信银行马鞍山分行荣获2023年马鞍山市外汇工作先进单位,吴沪寅同志被评为2023年马鞍山市汇率风险管理工作先进个人。2023年,在中信银行合肥分行党委正
...[详细] 为切实履行社会责任,进一步提升市民群众的金融风险防范意识,传播中信银行“让财富有温度”品牌形象。3月15日,特邀周边辛勤工作的环卫工人来到中信银行滁州分行户外劳动者服务站,开展公益讲堂,普及金融知识。
...[详细]
为切实履行社会责任,进一步提升市民群众的金融风险防范意识,传播中信银行“让财富有温度”品牌形象。3月15日,特邀周边辛勤工作的环卫工人来到中信银行滁州分行户外劳动者服务站,开展公益讲堂,普及金融知识。
...[详细] ICL晶体植入术是近视矫正的主流术式之一,目前在全球范围内被广泛应用。ICL炙手可热的背后,与其高清视觉质量、安全性高、可逆性及较为广泛的适应症等优势密不可分,而这些必须要有经验丰富、技术娴熟的ICL
...[详细]
ICL晶体植入术是近视矫正的主流术式之一,目前在全球范围内被广泛应用。ICL炙手可热的背后,与其高清视觉质量、安全性高、可逆性及较为广泛的适应症等优势密不可分,而这些必须要有经验丰富、技术娴熟的ICL
...[详细]合肥市长江路幼儿园教育集团总园:舌尖上的对决 ——大三班绕口令特色活动
 《3—6岁儿童学习与发展指南》中明确指出:幼儿的语言能力是在交流和运用的过程中发展起来的,应为幼儿创设自由、宽松的语言交往环境,鼓励和支持幼儿与成人、同伴交流,让他们想说、敢说、喜欢说,并能得到积极回
...[详细]
《3—6岁儿童学习与发展指南》中明确指出:幼儿的语言能力是在交流和运用的过程中发展起来的,应为幼儿创设自由、宽松的语言交往环境,鼓励和支持幼儿与成人、同伴交流,让他们想说、敢说、喜欢说,并能得到积极回
...[详细] 为提升中信银行财富管理品牌影响力,回馈中信银行滁州分行贵宾客户,提供最新宏观经济与行业发展资讯,解读最新政策及金融市场,中信银行滁州分行于3月15日举办“以信聚智•共策未来”投资策略报告会。中信银行滁
...[详细]
为提升中信银行财富管理品牌影响力,回馈中信银行滁州分行贵宾客户,提供最新宏观经济与行业发展资讯,解读最新政策及金融市场,中信银行滁州分行于3月15日举办“以信聚智•共策未来”投资策略报告会。中信银行滁
...[详细]工商银行马鞍山分行圆满举办“金融活水添新绿 携手‘工’植科创林”植树挂牌活动
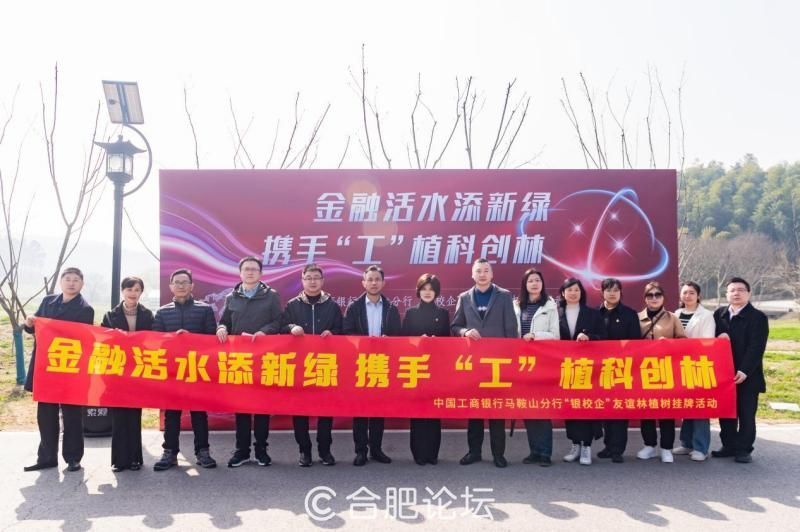 春回大地,万象更新,又是一年芳草绿。3月15日,工商银行马鞍山分行携手安徽工业大学工程研究院、马鞍山大学科技园共同举办“金融活水添新绿携手‘工’植科创林”植树挂牌活动。此次活动不仅是为高质量实施绿美马
...[详细]
春回大地,万象更新,又是一年芳草绿。3月15日,工商银行马鞍山分行携手安徽工业大学工程研究院、马鞍山大学科技园共同举办“金融活水添新绿携手‘工’植科创林”植树挂牌活动。此次活动不仅是为高质量实施绿美马
...[详细] 2022年9月16日,中信银行在中信大厦举办了品牌升级发布仪式,并发布了品牌口号“让财富有温度”。时值中信银行成立35周年之际,回顾发展历程,中信银行始终坚守服务实体经济初心,
...[详细]
2022年9月16日,中信银行在中信大厦举办了品牌升级发布仪式,并发布了品牌口号“让财富有温度”。时值中信银行成立35周年之际,回顾发展历程,中信银行始终坚守服务实体经济初心,
...[详细]爱的助力,扬帆起航 ——合肥市红星路小学与省委幼儿园联合开展“幼小衔接”主题讲座
 为深入贯彻落实教育部颁发的《关于大力推进幼儿园与小学科学衔接的指导意见》等文件精神,深入推进小学与幼儿园科学双向衔接,树立科学导向,减缓衔接坡度,帮助幼儿实现从幼儿园到小学的顺利过渡,3月15日下午,
...[详细]
为深入贯彻落实教育部颁发的《关于大力推进幼儿园与小学科学衔接的指导意见》等文件精神,深入推进小学与幼儿园科学双向衔接,树立科学导向,减缓衔接坡度,帮助幼儿实现从幼儿园到小学的顺利过渡,3月15日下午,
...[详细] 放心家政 皖星在行动——巾帼妇女创业就业,家政服务员专项培训
放心家政 皖星在行动——巾帼妇女创业就业,家政服务员专项培训 合肥市妇女儿童保健中心组织召开国自然项目研讨会
合肥市妇女儿童保健中心组织召开国自然项目研讨会 合肥市长江路幼儿园教育集团天成分园:结核病防治教育活动 ——你我共同努力 终结结核流行
合肥市长江路幼儿园教育集团天成分园:结核病防治教育活动 ——你我共同努力 终结结核流行 合肥市红星路小学无为路校区:手制绿意 树说春天
合肥市红星路小学无为路校区:手制绿意 树说春天 合肥蜀山区首个特殊食品专区专柜经营示范街区亮相
合肥蜀山区首个特殊食品专区专柜经营示范街区亮相
